 1、无人(rén)机(UAV)的(de)概念(niàn) 1、无人(rén)机(UAV)的(de)概念(niàn)
无人机(Unmanned Aerial Vehicle)就(jiù)是利用无(wú)线遥控或程序控制来执行特定航空任务的(de)飞行器,指不搭载操作人员的一种(zhǒng)动力空中(zhōng)飞行器,采用空(kōng)气(qì)动力为飞行器提供所需(xū)的升力,能够自动飞(fēi)行或远程引导(dǎo);既能一次性使用也能进行回收(shōu)。
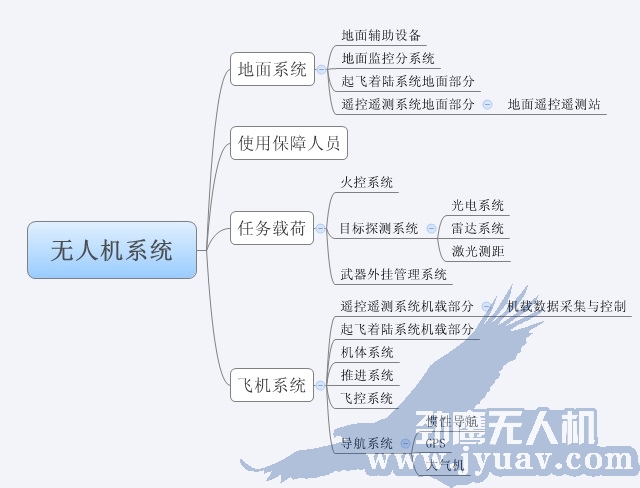
2、无(wú)人机系统的一般组成
无(wú)人机系统包括地面系统、飞机(jī)系统、任(rèn)务载(zǎi)荷和无(wú)人机(jī)使用保障(zhàng)人员。
3、无人机的一般分类
按(àn)用途(tú)分(fèn):
劲鹰航拍无人机、无人侦察机、靶机、特种无(wú)人机、诱饵无人机(jī)等。
按飞行方式分:
固定翼无人机、旋(xuán)翼无人机、扑翼无人机(jī)、飞艇。
4、无人机(jī)的飞行控制
无人机上没有驾驶(shǐ)员,所以无人机和飞行靠“遥控”或“自(zì)控飞(fēi)行”。
(1)遥控飞(fēi)行
遥控即对被控对象继续远距离控制,主(zhǔ)要(yào)无线电遥控(kòng)。
遥控信号:遥控站通过发射机向无人机(jī)发(fā)送无线电波,传递指令,无人机上(shàng)的接收机接(jiē)收并译出指(zhǐ)令(lìng)的内容,通过自动(dòng)驾驶仪(yí)按指令操纵舵(duò)面(miàn),或通过其(qí)他接口操纵(zòng)机上(shàng)的任务(wù)载荷。遥控(kòng)站设有(yǒu)搜索(suǒ)和跟踪雷达,他(tā)们测量(liàng)无人机在任意时刻相对地面(miàn)的方位角(jiǎo)、俯仰角、距离和(hé)高度等参数(shù),并把这(zhè)些参数输入到(dào)计算(suàn)机(jī),计算后就能(néng)绘出(chū)无人机的实际航迹,与预定(dìng)航线比较,就能求出偏差,然后发送指(zhǐ)令进行修正。
此(cǐ)外,无人机还装备有无线(xiàn)电应答器,也叫信标机。它能在收到雷(léi)达的询问(wèn)信号后,发回一个信号给雷达。由于信(xìn)标机发射的信(xìn)号比无人机发射(shè)的雷(léi)达信(xìn)号要强得多,起到增(zēng)加跟(gēn)踪雷达的探(tàn)测(cè)距离。
下传信号:遥控指令只包含(hán)航迹(jì)修(xiū)正信(xìn)号(hào)是显然不够的,在飞行中无人机会受到各种因素的影(yǐng)响,无人(rén)机(jī)的飞行姿态也在不(bú)断(duàn)变化,所以指(zhǐ)令还需要(yào)包括对(duì)飞行姿态的修正内容。
无人机(jī)上的(de)传(chuán)感器一直在收(shōu)集自身的姿态信息(xī),这些信息通过下传信号送到遥测终端,遥测终(zhōng)端分析这些信息后就(jiù)能给出飞行姿态的遥控修正(zhèng)指令(lìng)。
遥控(kòng)飞行(háng)的利弊:
利:有利于简化无人机的设(shè)计,降低制造成本。
弊:受无线(xiàn)电(diàn)作用距离的限制,限制通讯距离通常只可达到320KM~480KM;容(róng)易(yì)受(shòu)到(dào)电(diàn)子干扰。
(2)自控飞行
自控飞行(háng)不(bú)依赖地面(miàn)控制,一切动作都自动完成的(de)飞(fēi)行。为此,机上需要有(yǒu)一套装(zhuāng)置来保证飞行航(háng)向和(hé)飞行(háng)姿态的正确(què),这套(tào)装置就是导航装置。通常的导(dǎo)航装置有:
1.惯性导航
在机载设备上,它一般简称(chēng)惯导(dǎo)。惯性导航是以牛顿力学为基础,依(yī)靠安装(zhuāng)在(zài)载体(tǐ)内(nèi)部的加速度计测量(liàng)载体在三个轴向(xiàng)的(de)加速度,经积分运算后得到(dào)载体的(de)瞬时速度和位置(zhì),以(yǐ)及测(cè)量载体的姿态的一种导航(háng)方式。惯性(xìng)导航完全(quán)依(yī)赖机载设备自主完(wán)成导(dǎo)航任务,工作时不依赖(lài)外界信息,也不向外(wài)界(jiè)辐(fú)射能量,不(bú)易受到干扰,不(bú)受气象条件(jiàn)限(xiàn)制。
惯导系统(tǒng)是一种航位推算系统。只要给出载体的初始(shǐ)位(wèi)置及速度,系统就可以实时地推算出载体(tǐ)的(de)位置速(sù)度及姿态信息(xī),自(zì)主(zhǔ)地进行导航。纯惯导(dǎo)系统会随(suí)着飞行航时的增加(jiā),因积分积(jī)累而产生较大的(de)误差,导致定位精度(dù)随(suí)时间增长(zhǎng)而(ér)呈发散趋势,所以惯导一般(bān)与其他(tā)导航系(xì)统(tǒng)一(yī)起工作来提高定位精度(dù)。
2.卫星导(dǎo)航
全球定位系(xì)统(tǒng)(GPS)由(yóu)美国建立(lì)的一套定位系统,可以提供全球任意一点的三维空间位置(zhì)、速度和时间,具有全球性、全(quán)天候(hòu)、连续的精密导航系(xì)统(tǒng)。
全球卫(wèi)星(xīng)导航分为三(sān)部分,包括(kuò)空间卫星(xīng)部分、地面监(jiān)控、卫星(xīng)接收机(jī)部分。在飞机(jī)上安(ān)装(zhuāng)卫星接收机就能(néng)得到(dào)自身的位置信息和(hé)精确到(dào)纳秒级(jí)的时间信(xìn)息。
现(xiàn)在全(quán)球在使用的卫星导航系统还(hái)有:俄罗斯(sī)的glonass,欧洲的伽利略(luè)系统,还有中国正在建立的北(běi)斗系统(tǒng)。
3.多普(pǔ)勒导航
多普勒导航(háng)是飞行器常用的一(yī)种(zhǒng)自主导航系统(tǒng),它(tā)的工(gōng)作原理是多普勒效(xiào)应。
多普勒导航(háng)系统(tǒng)由磁罗盘或陀螺仪、多普勒(lè)雷达(dá)和导航计算(suàn)机组成。磁罗盘或陀螺仪类似指北针(zhēn),用于(yú)测出无人机的航向角,多普勒雷达不停沿(yán)着某个方向向地面发射电磁波,测出无人机相对地面的飞(fēi)行速度以及偏流角。根据多普勒雷达提供的地速和偏流(liú)角数据,以及磁罗盘或陀螺仪提供的航向数据,导航计算机就可以不停地(dì)计算出无人机飞过的路线(xiàn)。
多普勒导航系统能用于各(gè)种气(qì)象条件和地(dì)形条件,但(dàn)由于测量的积累误差,系(xì)统(tǒng)会随着飞行的(de)距离(lí)增加而使(shǐ)误差加大(dà),所以一(yī)般用于组合导航中(zhōng)。
4.组合(hé)导(dǎo)航
组合导航是指组合使用两(liǎng)种或两种以上(shàng)的(de)导航系统,达到取(qǔ)长(zhǎng)补短,提高导航(háng)性能。目(mù)前飞(fēi)行器上实际使(shǐ)用的导航系统各(gè)基(jī)本上都是组合导航系统,如(rú)GPS/惯性(xìng)导航、多普(pǔ)勒(lè)/惯性导(dǎo)航(háng)等,其中应用最广的(de)是(shì)GPS/惯(guàn)性导(dǎo)航组合导航系(xì)统(tǒng)。
5.地形辅助导(dǎo)航
地(dì)形(xíng)辅助导航(háng)是指(zhǐ)飞行器在飞行过程中(zhōng),利用预先存储的飞行路线中某些地区(qū)的特征数据,与实际飞行(háng)过程中(zhōng)测量到的相关数据进行不断(duàn)比较来实施导航修正的一种(zhǒng)方法。其核心是将地形分成多个小(xiǎo)网格,将其(qí)主(zhǔ)要特征,如平均标高等(děng)输入计算(suàn)机,构成一(yī)个数(shù)字(zì)化地图(tú)。
地形辅(fǔ)助导航技术(shù)就(jiù)是利用机载数字地图(tú)和无线(xiàn)高度(dù)表作为辅助手段来(lái)修(xiū)正惯(guàn)导(dǎo)系统的误差(chà),从而构成新的导(dǎo)航系统。它与导航方法(fǎ)的(de)根(gēn)本区(qū)别在于数字地图对(duì)主导(dǎo)航系统仅能起到辅(fǔ)助修正作用。
地形辅助系(xì)统可分(fèn)为地形匹(pǐ)配、景象匹配等。
◆地(dì)形匹(pǐ)配:也称地形高度相关(guān)。其(qí)原理是地球表面上任意一点的地理坐(zuò)标都可以(yǐ)根据(jù)其周围地域的等高线或(huò)地(dì)貌来当值(zhí)确定。飞行一段(duàn)时间(jiān)后,既可以得(dé)到真(zhēn)航(háng)迹(jì)的一串地形标高(gāo)。将测(cè)得的数据与存(cún)储的数(shù)字地图(tú)进行相关分(fèn)析,确定(dìng)飞机航迹对应的(de)网格位置。因为事先确定了网格各点对应的经纬度值,这(zhè)样就(jiù)可以使用数(shù)字地图校(xiào)正惯(guàn)导。
◆景象匹配:也称(chēng)景象相(xiàng)关。它与地图匹配的区(qū)别是,预先(xiān)输入到计算(suàn)机的信息(xī)不(bú)只是(shì)高度参数,还包含了通过(guò)摄(shè)像等手段(duàn)获取(qǔ)的预定(dìng)飞行路(lù)径的景象信息(xī),将(jiāng)这(zhè)些景象(xiàng)数字(zì)化后存储(chǔ)在机(jī)载设备上。飞行中,通(tōng)过(guò)机载摄(shè)像设备获取飞(fēi)行路径(jìng)中的景象,与预(yù)存数据(jù)比较,确定飞机(jī)的位置。
自控飞行的(de)利弊:
利(lì):航程加大;自主工作,不需要与地面站联系。
弊:复(fù)杂的自主导航(háng)系统和(hé)控制系统,增加了重量,提高了成本。
(3)遥控与自控结合
现代无人机在不同的飞行段,交(jiāo)替(tì)地采用遥控或(huò)自控飞行,这样可以充分利用遥(yáo)控和自控两种控制方式各(gè)自的优势(shì),克服彼此的(de)缺陷。
5、无人机(jī)的起飞和着(zhe)陆(lù)
有人驾(jià)驶飞机的起飞和降落是飞(fēi)行中(zhōng)的两大“难关”,无人驾驶飞机(jī)则(zé)更(gèng)是如此。
(1)无人(rén)机的起飞
1.母机投放(fàng)
由有人(rén)把无(wú)人机带上天,在适当(dāng)的地(dì)方投放起飞,这种(zhǒng)方法简单(dān)易(yì)行(háng),运用灵活(huó),成功率高,并且可(kě)增加无人机的航程。
2.火箭助推
借助固体火箭助推器,无人机(jī)从(cóng)发射架上起飞。这种起飞(fēi)方式占用的发(fā)射(shè)场地(dì)很小,适合前沿阵地、山区或船上使用。
3.起(qǐ)飞跑车
将(jiāng)无人机(jī)安装(zhuāng)在带轮的小车上,靠无人机的发(fā)动(dòng)机推进,当达到速度后,无(wú)人机脱离小车升(shēng)空。
这种方式可以使用(yòng)现成(chéng)的机场条件起飞,无需复(fù)杂的起落架,起飞跑(pǎo)车的(de)结构(gòu)简单、经济。
4.垂直起飞
利用(yòng)直升机的起飞原理起飞。如:劲鹰(yīng)2型(xíng)固定翼垂直起飞无人机,可垂(chuí)直起(qǐ)落(luò)、悬停、大载重、高限时。
5.起落架滑跑起飞
与有人驾驶飞机(jī)一样,使(shǐ)用本身的起落架滑跑起飞。
6.手发(fā)射
这种发射(shè)方式(shì)最简单,由一人或两(liǎng)人把握,靠无人机自身动力起飞。
(2)无人机的(de)着陆
1.起落架轮滑着陆
与(yǔ)有人驾驶飞机一样,使用本身的起(qǐ)落(luò)架降落。一(yī)般大(dà)型(xíng)无(wú)人机才采用这种(zhǒng)方式。
2.降落伞着陆
无人机采(cǎi)用降落伞悬吊回收。这种方式适合小型无人机,对于(yú)大型无人机,由于(yú)伞降回收的可靠性不高,操纵困(kùn)难(nán),损(sǔn)失率高。
3.空中(zhōng)回收
使用大飞机在空中回(huí)收无人(rén)机的方式目前只有美国采用(yòng)。采用这种(zhǒng)回收(shōu)方(fāng)式,在大(dà)飞(fēi)机上必须有空中回收系统。无人机除了有阻(zǔ)力伞(sǎn)和主伞外,还需有钩挂(guà)伞与吊(diào)索(suǒ)和可旋转的(de)脱落机构。大飞机用挂钩挂住无人(rén)机的钩(gōu)挂伞和吊索,用(yòng)绞(jiǎo)盘绞起(qǐ)无人机(jī),空中(zhōng)悬挂运走。这种回收方式不会损伤无(wú)人机,但每次回收都要出动大飞机,费用高,对大(dà)飞(fēi)机飞行(háng)员的驾驶(shǐ)技术(shù)要求高。
4.拦截(jié)网回收
用拦(lán)截(jié)网(wǎng)系(xì)统回收无(wú)人机是目前世界(jiè)小型(xíng)无人(rén)机(jī)普遍采用的回收(shōu)方(fāng)式之一。拦截(jié)网系统(tǒng)通(tōng)常由(yóu)拦截网(wǎng)、能量(liàng)吸收(shōu)装(zhuāng)置和自动(dòng)引导设备组成。能量吸收装置与拦截网相连,其作用是吸(xī)收无人机撞网的(de)能量,避免无(wú)人(rén)机触网后在网上弹跳不停受损。自动引导设备一般是(shì)一部置于(yú)网后(hòu)的电视(shì)摄(shè)像机(jī),或(huò)是装(zhuāng)在拦(lán)截网(wǎng)架(jià)上的红(hóng)外(wài)接收机,由它们及时向地面站报告无(wú)人机返航路线偏差。
5.气(qì)垫着陆
无人(rén)机机腹四周装(zhuāng)上“橡胶裙边”,中间(jiān)有(yǒu)一个带孔的气囊。发动(dòng)机把(bǎ)空气压入气(qì)囊,压(yā)缩空气从气囊孔喷出,在机腹下形成高压(yā)空气区—气垫。
气垫着陆最大的(de)优点是(shì):无人机能在未经(jīng)平整的地面、泥地、冰雪地(dì)或水上着陆(lù),不受地形条(tiáo)件限制。其次大小(xiǎo)无人(rén)机都可以使用,回收率高(gāo)。
6、无人机飞行(háng)平台
无人机的飞行(háng)平台(tái)主(zhǔ)要由六(liù)大部(bù)分(fèn)组成:机身、机翼、尾翼、起落装(zhuāng)置、飞行自动(dòng)控(kòng)制系统和动力(lì)系(xì)统。
1.机(jī)身(shēn)
机身主要用来装载发动机、燃油、任务设备(bèi)、电(diàn)源、控制操纵(zòng)系统等(děng),并(bìng)通过(guò)它将机(jī)翼、尾翼、起(qǐ)落架(jià)等部件连成一个(gè)整(zhěng)体。
2.机翼
机翼是飞行器用来产生升(shēng)力的主要部(bù)件。固定翼无人机的机(jī)翼有平直(zhí)翼、后掠翼、三角翼等。下图(tú)是一些常见的(de)机翼(yì):
平直(zhí)翼比较(jiào)适(shì)用于低速飞行器,后掠翼(yì)和三角翼比较适合(hé)高(gāo)速飞行器。
机翼上一般还有副翼,用于控制飞机的倾斜,但左右副翼偏转方向不同时,就会产生滚装力(lì)矩,是飞行(háng)器(qì)产生倾斜运动。
3.尾翼(yì)
尾翼(yì)分垂直(zhí)尾翼和水平(píng)尾翼两部分。对于(yú)一些结构比较特(tè)殊(shū)的无人机来(lái)说,可能会不设垂直尾翼或水平尾翼。
垂直尾翼(yì):垂直安装在(zài)机身尾部,主要功(gōng)能为保持机(jī)体的方(fāng)向平衡和操纵。通(tōng)常(cháng)垂直尾翼后缘有用于操纵方向的方向舵。
水平尾翼:水平安装在机身尾部(bù),主要功能为了保持俯仰平衡(héng)和俯仰操(cāo)纵。
4.起(qǐ)落(luò)装置
起落装置的功用是使(shǐ)无人机(jī)在(zài)地面或水面进行起飞、着陆、滑行和停(tíng)放。
起落装置对于无人机(jī)来(lái)说是形式最多(duō)样的(de)一部分,这是因(yīn)为(wéi)无人机有多种发(fā)射/回收(shōu)方式。大型无人机的起落(luò)装置包含起落架和改善起落性(xìng)能的装置两部分(fèn),起飞后起落(luò)架收起,减(jiǎn)少飞行阻力;多数(shù)无人机的起落架很简单,飞(fēi)行时也不收起;对于采用弹射、拦阻网(wǎng)等方式进行发射/回收的小型无人机就不需要起落架(jià);对于采用手掷发射的(de)小型无人机,就没(méi)有起落(luò)装置;伞降回收的无人机着陆装置可以(yǐ)说就是降(jiàng)落伞(sǎn)。
5.飞行自动控制系统
飞行自(zì)动控制系统(tǒng)包括控制指令自(zì)动形成装置和(hé)传输操纵装置。指令(lìng)自动形成装置包括(kuò)自动驾驶仪和相关的传(chuán)感器、导航(háng)设备;传输(shū)操纵装置包括从控制(zhì)指令输出点到水平尾(wěi)翼、副(fù)翼、方向舵(duò)等操纵面,用来传递操纵指令,改变飞行状态的所有装置。
6.动力装置
飞机动力装置是用来(lái)产生拉力(如螺(luó)旋桨飞机)或(huò)推力(lì)(如(rú)喷气式飞机),使飞机前进的装置(zhì)。现代无人机(jī)的动力(lì)主要分为涡(wō)轮喷气(qì)发动机和涡轮(lún)风扇发动机两(liǎng)类。 (来源:互联网综合(hé)编辑)
更多(duō)经验技巧加老鹰微信laoyingfly交流 |







